

Neuro-Symbolic Instance Generator
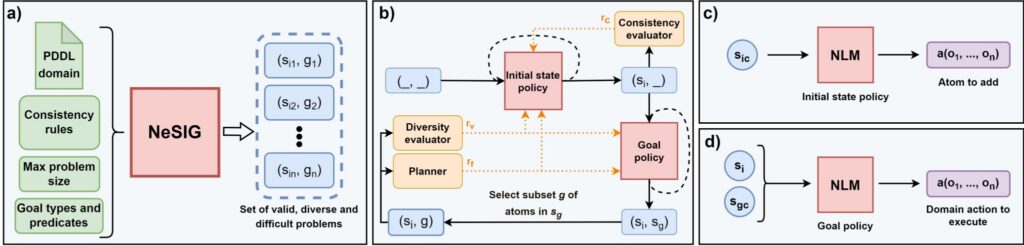
NeSIG (Neuro-Symbolic Instance Generator) is a neuro-symbolic method that represents the state of the art (SOTA) in the automatic generation of planning problems/instances. Given a planning domain, encoded in the PDDL language, NeSIG learns to generate problems for that domain in such a way that they are valid, diverse, and difficult to solve. For example, NeSIG can be used to generate game levels (e.g., Sokoban) given a description (in PDDL) of its dynamics.
As a neuro-symbolic method, NeSIG combines the classic symbolic approach with the more modern sub-symbolic or connectionist approach, based on Deep Learning, to solve the task of problem generation. On one hand, it takes as input a symbolic representation of the system for which problems are to be generated (called a planning domain) and a list of conditions that the generated problems must meet. These conditions, called consistency rules, are represented in a simple manner through a new semi-declarative language (which combines Python and logic) created specifically for this purpose. This language is available on GitHub (https://github.com/TheAeryan/PDDL-Prover) and the Python package repository PyPI, currently accumulating over 2,000 downloads.
Given the symbolic description of the domain and consistency rules, NeSIG uses Deep Learning, more specifically Deep Reinforcement Learning (DRL), to learn to generate valid, diverse, and challenging problems. To achieve this, the problem generation process is formulated iteratively, step by step, and two generative policies are trained with DRL to learn how to generate problems. The first policy learns to generate the initial state of the problem by successively adding objects and atoms (relations) to an empty state. Once the initial state is generated, a second policy generates the problem’s goal by successively applying actions to that initial state. During this generation process, the validity, diversity, and difficulty of the generated problems are evaluated, resulting in a reward signal that is used to train both generative policies. Finally, these policies are represented through a Neural Logic Machine, a type of neuro-symbolic neural network capable of reasoning and inductive learning from data represented in logical format, such as PDDL.
This work has been accepted at the international conference ECAI (European Conference on Artificial Intelligence) in 2024, under the title “NeSIG: A Neuro-Symbolic Method for Learning to Generate Planning Problems” and is also available in the open-access repository ArXiv.
The ECAI article can be cited as follows:
Núñez-Molina, C., Mesejo, P., & Fernández-Olivares, J. (2024). Nesig: A neuro-symbolic method for learning to generate planning problems. European Conference on Artificial Intelligence
The algorithm’s code can be found on GitHub. This repository provides a Docker image with usage instructions for easy installation. Additionally, it includes the data from the experiments conducted for the article published at ECAI (excluding checkpoints and logs due to their large size).
GitHub repository: https://github.com/ari-dasci/S-PlanningProblemGeneration
Contact: Carlos Núñez Molina